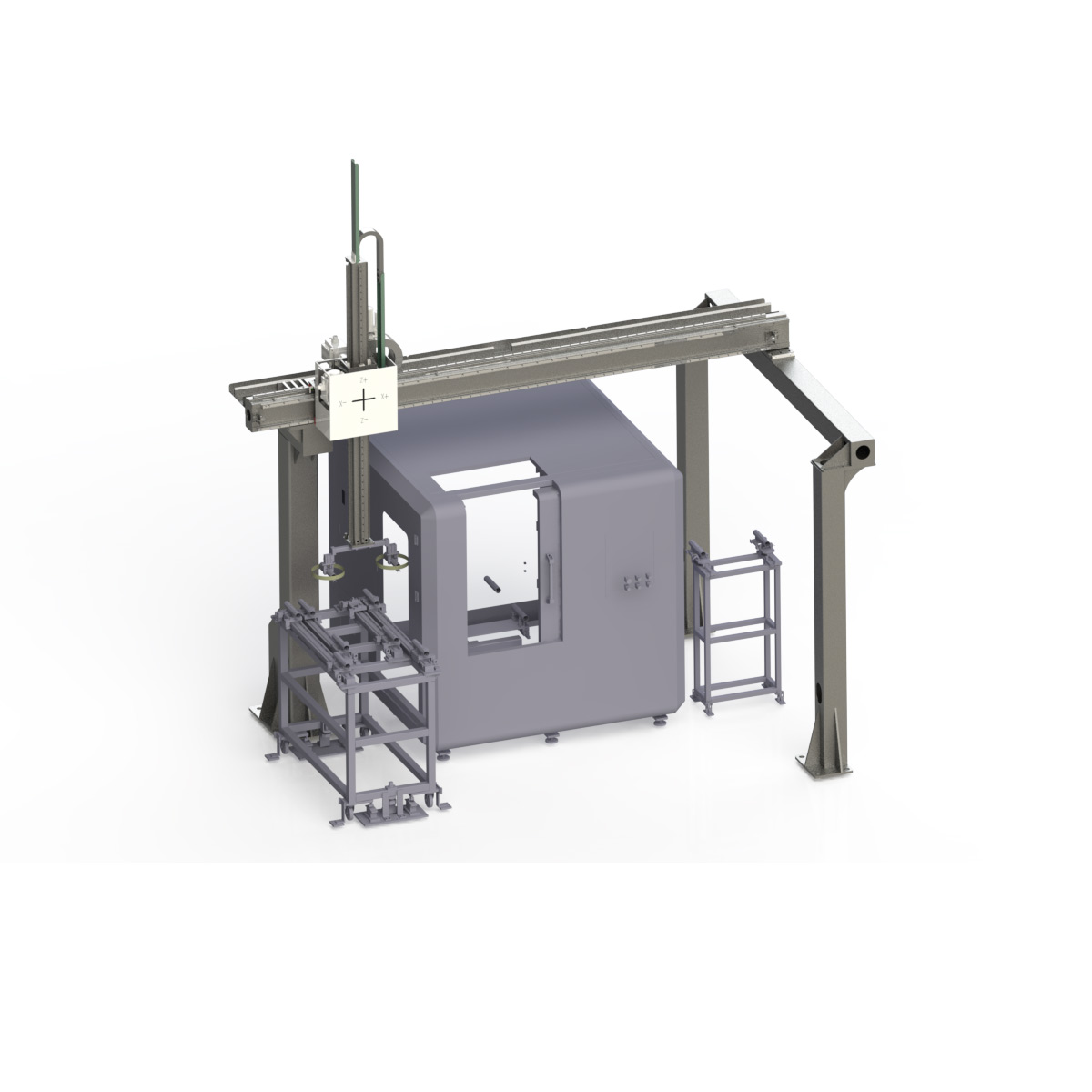
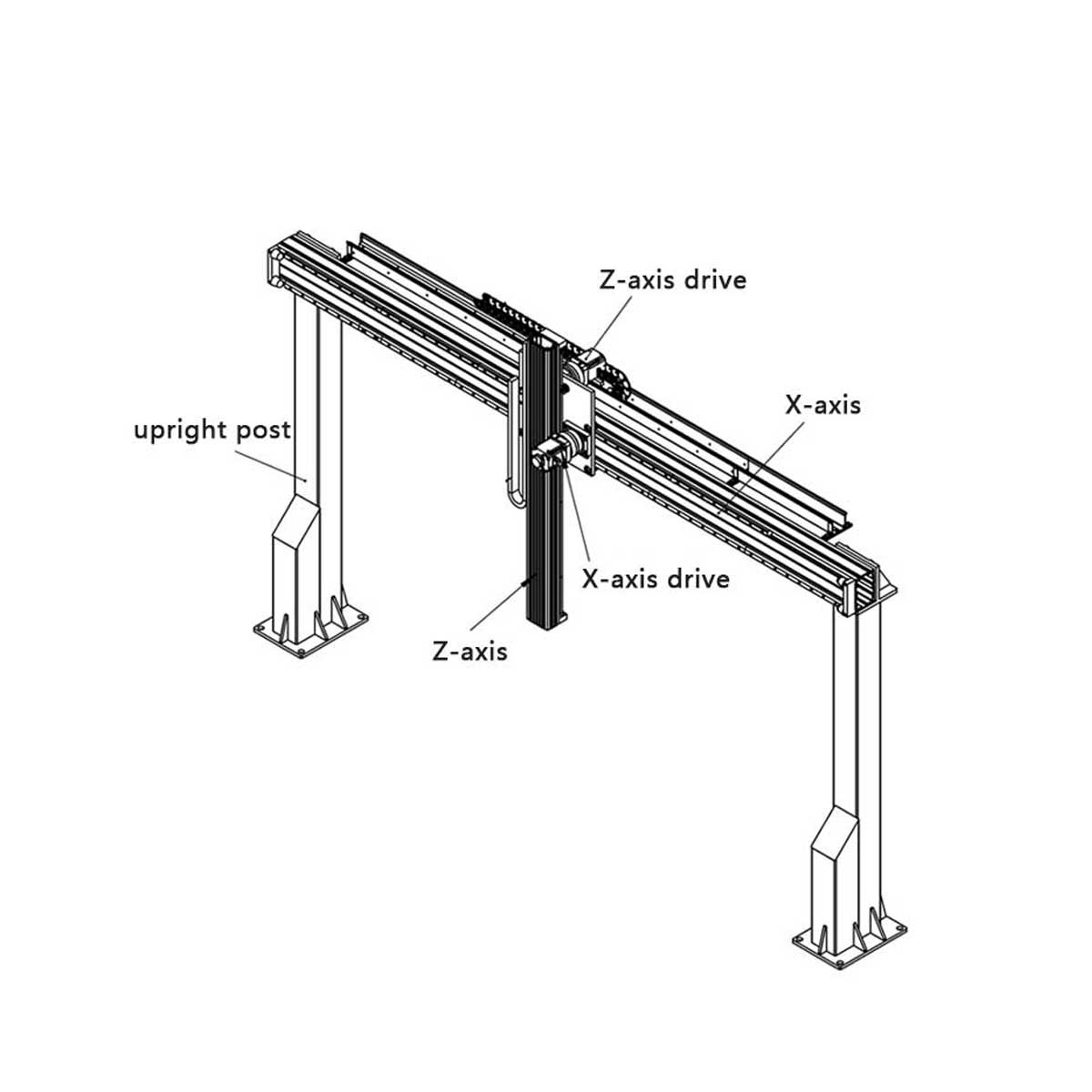
1. Horizontal beam (left-right direction) X-axis, driven by servo motor;
2. Vertical beam (up and down direction) Z-axis, driven by servo motor (with brake);
3. The Z-axis end effector is equipped with various grippers due to the different shapes of the grasped objects;
4. Multiple vertical Z-axis positioning systems can be installed on the same horizontal X-axis positioning system based on the rhythm and stroke of the object being transported;
5. Using a truss manipulator control system to coordinate actions with the machine tool and set various parameters;
The main parameters include:
① Operating speed;
② Itinerary;
③ Production quantity/cumulative quantity;
④ Working hours;
⑤ Control permissions, etc.
Manufacturing, automotive, semiconductor, electronics, hazardous areas, etc
| Cross truss application case | 2.13 MB | Download |